Společnost Yaskawa nabízí portfolio produktů, díky kterým je předním výrobcem v oblasti měničů střídavého proudu, servopohonů, řídicí technologie a robotiky.
Pick & Place
Přehled
Pick & Place a vybírání do košů pomocí robotů Motoman
Robot pick-and-place se používá k automatizaci procesu odebírání předmětů a jejich umístění na povrch v nastavené poloze a orientaci. Tato činnost se často používá k třídění nebo ukládání výrobků do určitého uspořádání pro následný proces, jako jsou zásobníky nebo bedny, kde s výrobky může správně manipulovat pevné strojní zařízení nebo jiný robot. Typické úlohy pick & place se používají pro vysokorychlostní vychystávání, skládání, přenos dílů, třídění a kontrolu. V mnoha případech přicházejí díly po dopravním pásu a pohyb pick & place pomáhá díly roztřídit nebo uspořádat do určitého pořadí na místě.
Pick and Pack je varianta Pick & Place, která se používá u balení, kde je pohyb při umísťování složitější a slouží k plnění kontejnerů, krabic nebo beden. Někteří lidé říkají PPP - Pick, Place and Pack. Terminologie v tomto oboru není sjednocena.
"Bin Picking" je nově vznikající robotická technologie sběru kusů, která využívá 3D vidění.
Rychlost a výkonnost
Všechny aplikace Pick & Place mají ve svých specifikacích stejný cíl - vysokou výkonnost a nízkou dobu cyklu! Kompletace a umísťování je pro roboty náročná práce. Není to prostor pro nespolehlivé manipulátory-hračky. Roboti Motoman jsou dostatečně pevní a stabilní, aby mohli tuto práci vykonávat 24 hodin denně, 7 dní v týdnu, bez přehřívání pohonů, brzdění převodovek nebo létajících šroubů a ramen po některých týdnech.....
Roboti a produkty Motoman pro kompletaci a ukládání zboží
Pro vysokorychlostní vychystávání, skládání, přenášení dílů, třídění a kontrolu se běžně používají roboti s nosností od 2 kg do 10 kg s dobou cyklu až 150 vychystávacích cyklů za minutu. Naše řada modelů robotů pick-and-place zahrnuje sériově propojená kloubová ramena s 5 nebo 6 stupni volnosti, paralelní ramena typu delta se 4 stupni volnosti a ramena typu SCARA se 4 stupni volnosti.
Pick&Place s roboty Delta (řada MPP3)
Pokud jde o rychlost, nic nepřekoná naše roboty Delta (MPP3H, MPP3s), které zrychlují až na 4 vychystávací cykly za sekundu! Pokud umístíte čtyři z nich do řady nad dopravníkový pás, vybavené 2D kamerou MotoSight a softwarem MotoPick, můžete dosáhnout rychlosti vychystávání v rozmezí 600 až 800 dílů za minutu na vychystávací linku.
Pick & Place s roboty SCARA (řada SG)
Roboty SCARA (horizontálně kloubové roboty) jsou dobrou volbou pro úlohy pick/place nahoru/dolů na plochém stole. Naše zcela nové modely robotů řady SG (SG450, SG650) nabízejí neuvěřitelné rychlosti os (osa R 3000 stupňů/s), které jsou schopny provádět mimořádně vysoké rychlosti vychystávání s atraktivní cenou.
Pětiosé roboty Pick & Place (řada MPK)
Tyto kloubové roboty se obvykle montují na strop nad pás, podobně jako roboty Delta, ale mají univerzálnější pohybové schopnosti. Dokážou díl odebrat a otočit do cílového místa umístění.
Pick & Place s 6osými roboty (MotoMini, řada GP)
Naše malé 6osé roboty (MotoMini, GP7/GP8) jsou vhodnou volbou v případech, kdy je třeba díl během vychystávání otáčet/naklánět nebo kdy se směr vychystávání liší od směru umísťování.
Větší šestiosé roboty se používají pro složitější aplikace Pick&Place, kde je volnost pohybu 6 stupňů pohybu skutečně vyžadována. Nejvyšší rychlost zde není problémem. Například v aplikacích vychystávání do zásobníku, kde software strojového vidění určuje individuální cílovou polohu a přibližovací trajektorii pro každý díl zvlášť a kde jsou čas od času nutné pohybové manévry, aby se vypořádaly se stěnami zásobníku a sousedními díly v zásobníku.
Pick & Place with Collaborative Robots (HC Series)
Coboty jako HC10 nemohou konkurovat průmyslovým robotům, pokud jde o rychlost, ale mohou mít jiné výhody, které je třeba zvážit pro aplikace Pick and Place - snadné použití, instalace bez ohrazení nebo jen asistence člověku při jeho práci. Naše coboty HC10 jsou hybridy, které jsou schopny přepínat z režimu bezpečné interakce s člověkem na vyšší rychlost ve fázích, kdy obsluha chybí. Kolaborativní roboty (HC10) by mohly být volbou v prostředí brownfieldů, kde šetří instalační prostor tím, že se vyhýbají oplocení. Jsou velmi flexibilní z hlediska rekódování a flexibility umístění. S Coboty lze realizovat dělat velmi atraktivní, inteligentní a úsporné vychystávací stanice.
Sledování dopravníků a linek
Základní funkcí řídicí jednotky robota pro aplikace Pick & Place je sledování pohybu dopravníku, které umožňuje synchronizaci dráhy robota s vnějším pohybem zachyceným snímačem, například s dopravníkovým pásem. Funkce sledování dopravníku YASKAWA podporuje jak liniové sledování (sledování lineárního pohybu), tak kruhové sledování (sledování kruhového pohybu). Díky velmi rychlému interpolačnímu cyklu a konstrukci naší desky se snímačem dopravníku je synchronizace dopravníku velmi citlivá a dokonale reaguje i na nepatrné změny rychlosti dopravníkového pásu.
Software MotoPick
Software MotoPick Software umožňuje naprosto snadnou instalaci a programování těchto vychystávacích linek, provádí za vás veškeré výpočty a automaticky rozhoduje, který robot je další na řadě při vychystávání dílu. Všechny roboty Motoman lze kombinovat se synchronizovanými dopravníkovými pásy a provádět tak vysokorychlostní operace pick-and-place. Více robotů, systémy vidění a dopravníky s více díly jsou koordinovány společným softwarovým řešením pro přesné třídění výrobků a vkládání obalů. Pomocí našeho snadno konfigurovatelného softwaru MotoPick můžete uspořádat až 4 roboty Pick&Place do řady za 2D kamerou s viděním, která identifikuje příchozí díly na pásu, a rozdělit vychystávací úlohu robotům sdílejícím pás. Takové vychystávací linky mohou dosahovat opravdu obrovské rychlosti vychystávání!
Programování robotů pomocí funkčních bloků PLC/IEC 61131 (MotoLogix)
Roboty Pick&Place jsou často zabudovány nebo integrovány do prostředí PLC/Logic nebo strojů řízených pohybem. Pokud pracujete jako OEM výrobce vysokorychlostních balicích linek, máte ve výrobní lince hodně pohybu a jen tu a tam několik robotů Pick/Place/Palletizing, vaši programátoři PLC si oblíbí náš programovací nástroj Motologix založený na PLC. Pohybové úlohy robotů programuje kompletně programátor PLC ve svém vývojovém prostředí založeném na IEC. Motologix poskytuje všechny funkční bloky PLC potřebné k řízení pohybu robota pick&place, včetně podpory dopravníků. Není třeba překopávat robotický výukový panel ani se učit programovací jazyk robota.
Robotická chapadla
Klíčovým faktorem úspěchu pro úspěšnou instalaci robotického pick&place je chapadlo. Extrémní setrvačnost rychlého robotického cyklu může snadno způsobit, že dílec vyletí z chapadla, pokud není správně upevněn. Často se používají sací chapadla, někdy podpořená chytrými mechanickými prvky, které zabraňují vylétnutí dílu v důsledku extrémního zrychlení. Společnost Yaskawa vám může pomoci díky vynikající síti a zkušenostem s dodavateli všech druhů pneumatických, krokových/servoelektrických nebo exotických chapadel. Technologie 3D tisku se často používá pro konstrukci prstů chapadel nebo skříní chapadel, aby se snížila hmotnost, prostoje a doba výměny náhradních dílů.
Některá kolaborativní chapadla byla výslovně navržena pro bezpečnou spolupráci člověka s robotem.
Všechny instalace robotických chapadel MOTOMAN jsou snadno použitelné - bez ohledu na to, zda využíváte naše bohaté know-how v oblasti propojení nebo naši řadu chapadel Smart Series, což je inteligentní iniciativa společnosti Yaskawa pro chapadla Plug&Play. Většina 5/6osých robotů Motoman má standardní vnitřní mediální kabeláž uvnitř ramene, což vám pomůže vyhnout se externím kabelovým převlekům. Řídicí jednotky Yaskawa podporují všechny druhy I/O, sběrnic nebo Wi-Fi komunikace s chapadly, včetně Ethernetu, Profinetu, Profibusu, Devicenetu, Ethercatu, IOLinku. Všechny výukové metody (Standard Teach Pendant, Smart Pendant a Hand Guiding) nabízejí jednoduché a rychlé metody ovládání chapadel. Některé uchopovače řízené silou/polohou vyžadují nastavení parametrů, některá řešení jsou pro větší pohodlí zabudována do HMI robota.
Systémy strojového vidění (2D, 2,5D, 3D)
V mnoha operacích Pick & Place se používají systémy strojového vidění. Technologie strojového vidění dosáhla v posledních pěti letech zajímavého pokroku - z hlediska miniaturizace, jednoduchosti a schopností. Umožňují robotům identifikovat a lokalizovat netříděné díly umístěné na stole, zásobníku nebo dopravníkovém pásu. S určitým softwarovým zpracováním říkají robotovi, kde má díly odebírat a jak se k nim má přiblížit. Dále umožňují kontrolu vlastností dílů a výsledků montáže.
Systém Pick & Place založený na strojovém vidění představuje rovnováhu mezi rychlostí a flexibilitou.
Roboty Motoman lze bezproblémově integrovat se systémy vidění všeho druhu. Nebo se nás zeptejte na naše obecná nebo individuální propojení se stovkami různých kamerových a softwarových řešení, která jsme v průběhu let úspěšně zavedli do pracovních aplikací.
MotoSight 2D Vision
V aplikacích Pick and Place stačí pro lokalizaci polohy vychystávání na stole nebo dopravníku jednoduché 2D strojové vidění. Díly by měly být spíše ploché a neměly by se překrývat a systémy 2D Vision vyžadují stálé dobré osvětlení a vysoký kontrast mezi dílem a pozadím.
MotoSight2D je plně integrovaný produkt Smart Camera, který doporučujeme, nicméně podporujeme všechny druhy kamerových systémů Vision třetích stran.
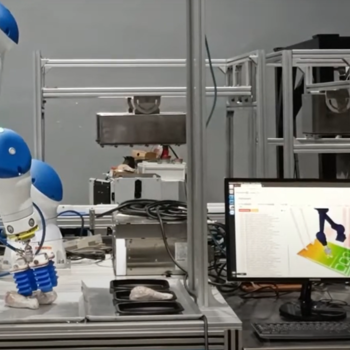
3D vybírání košů, inteligentní vychystávání, hluboké učení
Robotický Bin Bicking je technologie schopná vybírat z koše díly, které tam byly předtím náhodně nasypány a nyní přicházejí v chaotickém pořadí. Pro řešení této výzvy kombinuje robotický Bin Picking pokročilou technologii 3D strojového vidění, komplexní software pro plánování cesty a chytrou technologii uchopovače dílů.
Technologie sběru do koše je velmi flexibilní a v posledních letech prošla velkým vývojem, pokud jde o rychlost, inteligenci detekce a snadnou instalaci.
Z pohledu strojového vidění mají aplikace pro vybírání košů několik úrovní náročnosti:
1.všechny díly v koši jsou identické, geometrie dílů je předem známá - vzorové díly lze předem natrénovat.
2.různé varianty dílů v zásobníku, geometrie dílů je známa předem - vzorové díly lze předem natrénovat.
3.různé varianty dílů v zásobníku, geometrie dílů není předem přesně známa - vzorové díly nelze předem natrénovat.
Zatímco body 1. a 2. lze řešit klasickým softwarem pro rozpoznávání 3D dílů, bod 3. může být případem pro umělou inteligenci a neuronové sítě.
Automatizace distribuce širokého a různorodého sortimentu dílů nebo SKU již není výzvou. Pokroky v robotice s 3D viděním zvyšují rychlost i přesnost identifikace a třídění téměř jakékoli směsi dílů v zásobnících, přepravkách, bednách nebo kartonech. Konvenční systémy vidění vyžadují k tréninku každé varianty dílu a situace vychystávání vzorové díly, zatímco nejnovější softwarové technologie hlubokého učení umožňují náhodné vychystávání dílů, které jsou automaticky trénovány neuronovou sítí. Vychystávání do zásobníků je náročná aplikace - s překonáním typických překážek vám můžeme pomoci odbornými znalostmi.
Použití špičkových technologií, jako je Bin Picking, je v pořádku, ale není to "nutnost", pokud by stejnou úlohu splnilo pragmatičtější řešení. Naši technici vám pomohou najít nejlepší a nejspolehlivější řešení vychystávání pro váš případ použití. Někdy je možné změnit způsob prezentace dílů směrem nahoru, což vám umožní instalovat jednodušší technické řešení, např. ukládáním dílů ve vrstvách.
Podávání dílů pomocí robotů Motoman Pick & Place
Vibrační podavače dílů představují inovativní způsob, jak prezentovat díly nebo spojovací materiál robotovi. V kombinaci s chytrými podavači jsou malé roboty jako MotoMini, SG400 nebo GP8 alternativou ke klasickým vibračním podavačům s miskou. Tento způsob podávání není levnější ani rychlejší než klasické šroubové podávání, ale je mnohem flexibilnější a stabilnější - má menší nároky na tolerance šroubů, rychlejší nastavení bez nutnosti šroubových vzorkových dávek a je snadno přizpůsobitelný změnám geometrie šroubů nebo tolerancí.